关键点的捕捉
Chivas-Regal
# 捕捉作用
给一个可以抠取部分矩阵的首帧并将其抠出
对每个帧用图像处理(饱和度和色高)处理成特征图像(直方图)
在总图像中寻找该特征图像——可旋转、可倾斜
# 捕捉步骤
# 图像处理
灰度化图像
在原图上高斯模糊一次为 result1 ,在 result1 上模糊第二次为 result2 ,计算矩阵差值得到 dif
将差值归一化(以便观察到哪些地方有差值)
缩小与旋转怎么办
有一定的东西是不变的
- 缩小:固定占比
- 旋转:对点乘上角度基本可以匹配上(允许误差的存在)
所有点的话数量太大效率太低,于是使用 关键点
关键点为每一个曲线中的两个端点和拐点,这样在提取出来的特征矩阵中特征点较少,提高了灵活匹配性与准确度
# 程序
# include <iostream>
# include <vector>
# include "opencv2/opencv.hpp"
# include "opencv2/core/core.hpp"
# include "opencv2/features2d/features2d.hpp"
# include "opencv2/highgui/highgui.hpp"
# pragma comment(lib, "opencv_core249d.lib")
# pragma comment(lib, "opencv_highgui249d.lib")
# pragma comment(lib, "opencv_imgproc249d.lib")
# pragma comment(lib, "opencv_features2d249d.lib")
# pragma comment(lib, "opencv_nonfree249d.lib")
int main () {
cv::namedWindow("in", cv::WINDOW_AUTOSIZE);
cv::namedWindow("out1", cv::WINDOW_AUTOSIZE);
cv::namedWindow("out2", cv::WINDOW_AUTOSIZE);
cv::namedWindow("out3", cv::WINDOW_AUTOSIZE);
cv::Mat img = cv::imread("/Users/snopzyz/Desktop/opencvtest.jpg");
cv::imshow("in", img);
cv::Mat gray, out1, out2, dog;
cv::cvtColor(img, gray, cv::COLOR_BGR2GRAY);
cv::GaussianBlur(gray, out1, cv::Size(7, 7), 0, 0);
cv::GaussianBlur(out1, out2, cv::Size(7, 7), 0, 0);
cv::subtract(out1, out2, dog);
cv::normalize(dog, dog, 255, 0, cv::NORM_MINMAX);
cv::imshow("out1", out1);
cv::imshow("out2", out2);
cv::imshow("out3", dog);
cv::Ptr<cv::SiftFeatureDetector> feature = cv::SiftFeatureDetector ::create();
std::vector<cv::KeyPoint> kp;
try {
feature->detect(gray, kp);
std::cout << kp.size();
} catch (cv::Exception &e) {
std::cout << e.msg << std::endl;
}
cv::drawKeypoints(gray, kp, img);
cv::imshow("key-point", img);
kp.clear();
cv::waitKey(0);
cv::destroyAllWindows();
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
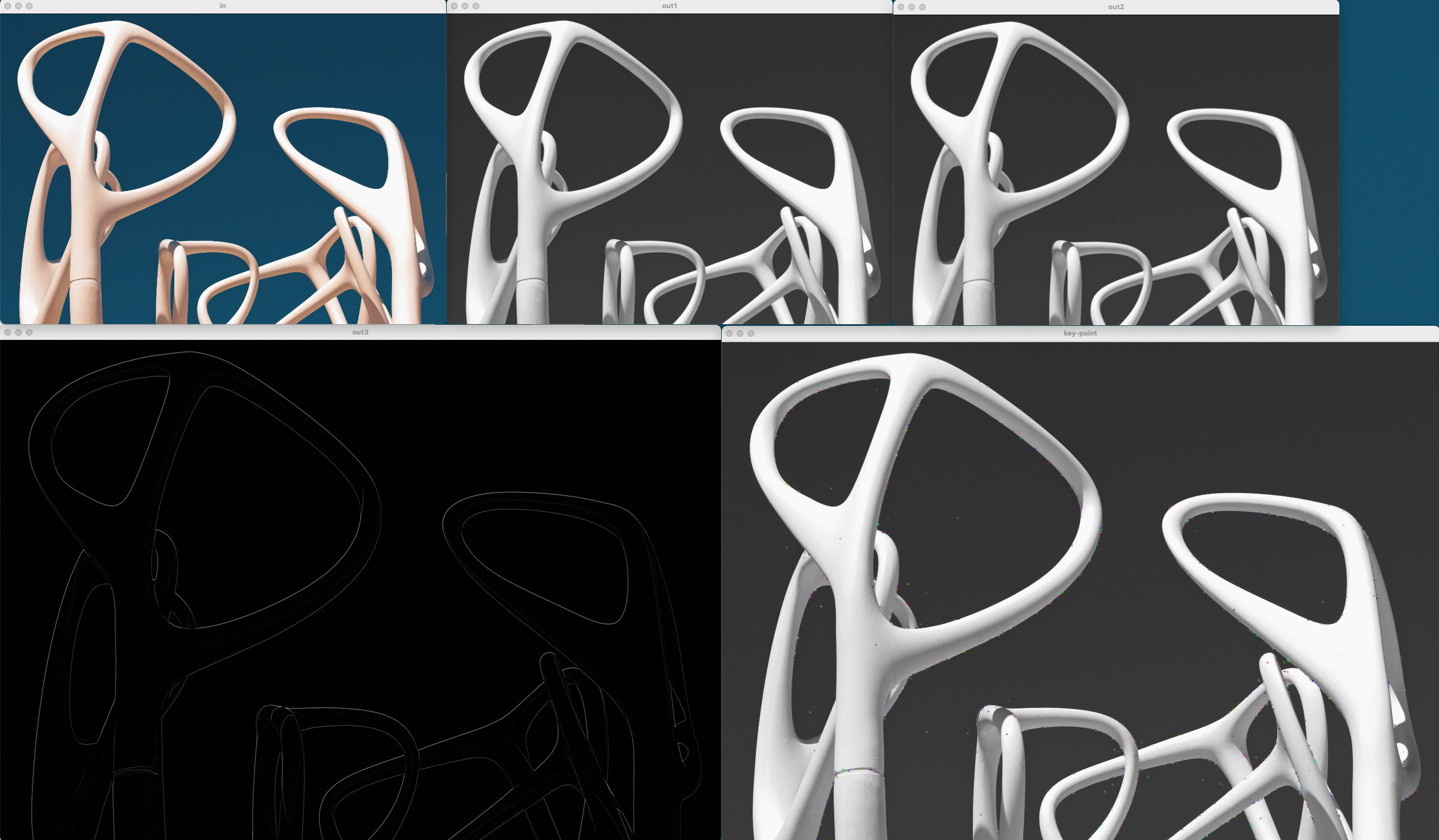
(将图片放大,会看到右下角的图有很多彩色小圈圈,就是关键点)
# 检测思考
从小的往大的走,对于一个尺寸下:
首先从一个地方开始移动矩形框,在路线中匹配度不断升高,而部分进入识别的正确区域时匹配度会升高较快,也就是在移动中不断锁定识别的正确区域
而每次对每一个帧查找完成之后,下一次将会优先搜索这个帧附近的区域,毕竟现实移动也是在这个查找成功的区域内移动
故在移动较快时会产生脱焦的情况